Реферат "Отличительные особенности электровоза 2ЭС10 «Гранит»". Автор: Зимин Владислав Сергеевич
Реферат "Отличительные особенности электровоза 2ЭС10 «Гранит»". Автор: Зимин Владислав Сергеевич
Наименование темы работы: Отличительные особенности электровоза 2ЭС10 «Гранит».
Вид работы: Реферат.
ФИО обучающегося: Зимин Владислав Сергеевич.
Краткая аннотация:
Изучил теоретические сведения о новом грузовом электровозе 2ЭС10 и его технические характеристики.
Исследовал систему управления электровозом.
Провел анализ усовершенствования электровоза «Гранит» по сравнению с локомотивом 2ЭС6.
Изучил функции микропроцессорной системы управления и диагностики электровоза «Гранит».
Сделал вывод: Мощность «Гранита» позволит машинистам водить составы весом до 9-10 тыс. т, что в два раза больше, чем вес состава, который способен взять электровоз BЛ10. «Гранит» не имеет аналогов в России и в других странах, где ширина колеи составляет 1520 мм. В нем внедрено 60 % инженерных решений, ранее не применявшихся в российском машиностроении.
Вы уже знаете о суперспособностях современного учителя?
Тратить минимум сил на подготовку и проведение уроков.
Быстро и объективно проверять знания учащихся.
Сделать изучение нового материала максимально понятным.
Избавить себя от подбора заданий и их проверки после уроков.
Просмотр содержимого документа
«Реферат "Отличительные особенности электровоза 2ЭС10 «Гранит»". Автор: Зимин Владислав Сергеевич»
Отличительные особенности электровоза 2ЭС10 «Гранит»
В настоящий момент остро стоит вопрос об изношенности текущего парка тягового подвижного состава. В тоже время руководство компании ОАО «РЖД» ставит своей задачей повышение уровня производительности труда до показателей мировых лидеров железнодорожного транспорта. Предположим, что локомотив с более высокими техническими характеристиками может обеспечить улучшение параметров грузоперевозок на конкретном участке.
Новый грузовой электровоз 2ЭС10 не имеет аналогов не только в России, но и на всем «пространстве 1520» [2]. Эта модель отличается повышенной мощностью и силой тяги. При стандартных весовых параметрах машина будет способна водить поезда весом примерно на 40 — 50 % больше, чем электровозы серии ВЛ10. В созданную компанией «Уральские локомотивы» базовую платформу электровоза 2ЭС10 интегрированы современные разработки компании «Siemens» — блок вспомогательных трансформаторов, дроссель входного фильтра, блок охлаждения, тяговый преобразователь, тяговый двигатель и интегрированный редуктор.
В перспективе при условии выпуска локомотива 2ЭС10 в трехсекционном исполнении будет разработана и внедрена технология вождения тяжеловесных поездов весом 9000 т без разделения состава и смены локомотива, что позволит сократить затраты на себестоимость перевозок и увеличить провозную способность железной дороги.
Этот современный локомотив повышенной мощности способен, заменить 2 — 3 электровоза серии ВЛ10. В связи с этим предполагается значительно сократить эксплуатационные затраты.
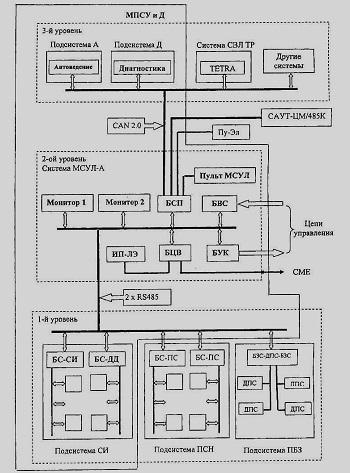
Управление электровозом осуществляется с помощью микропроцессорной системы управления, в которую интегрированы системы диагностики и автоведения. Система бортовой диагностики адаптирована для связи через серверы центров управления перевозками со стационарными автоматизированными рабочими местами пунктов ремонта и технического обслуживания локомотивов.
Электровоз «Гранит» значительно усовершенствован по сравнению с локомотивом 2ЭС6, который с 2008 г. серийно выпускается на уральском заводе. Он, например, «видит» неисправность двигателя, системы охлаждения, преобразователя и самостоятельно может их отключать. Новый электровоз способен работать как в автоматическом, так и в ручном режимах. И если по различным параметрам электровоз 2ЭС6 превосходит ВЛ11 на 25 — 30 %, то технические характеристики 2ЭС10 превышают 2ЭС6 на 30 %.
Микропроцессорная система управления и диагностики выполняет функции управления всеми системами электровоза, требующие логической последовательности по командам, получаемым с пульта, с учетом сигналов, получаемых от датчиков [3].
Она устанавливается в каждой секции электровоза, при этом осуществляется взаимодействие между секциями электровоза по межкузовной линии связи.
Микропроцессорная система управления и диагностики предназначена для эксплуатации на электровозах с управлением асинхронными тяговыми электродвигателями посредством управления тяговым преобразователем и с напряжением в цепях управления электровоза 110В.
Она включает в себя подсистему управления локомотивом, подсистему аналоговых измерений, подсистему автоведения и подсистему диагностики.
По своему функционалу она обеспечивает:
- автоматизированное управление в режимах «Ручное регулирование» и «Авторегулирование» с учетом профиля пути и сигналов, получаемых от датчиков и аппаратов предусмотренных схемой электровоза;
- контроль за состоянием оборудования и агрегатов;
- диагностику оборудования и аппаратов.
Подсистема управления локомотивом обеспечивает:
- разгон электровоза до заданной скорости с возможностью последующего автоматического поддержания скорости в диапазонах, определяемых тяговыми характеристиками электровоза;
- плавное изменение силы тяги;
- электрическое торможение до заданной скорости с возможностью последующего автоматического поддержания скорости (на спусках), определяемых тормозными характеристиками электровоза:
- плавное изменение силы торможения;
- защиту от буксования и юза;
- регулирование частоты вращения вентиляторов в зависимости от протекающих токов в цепях ТЭД;
- контроль протекающих процессов при управлении электровозом с отображением результатов на мониторе и выдача голосовой информации;
- дублирование основных функций по двухканальной линии связи;
- запись в энергонезависимую память параметров функционирования для последующей расшифровки на персональном компьютере действий машиниста в управлении электровозом, его состояния и состояния микропроцессорной системы управления.
Рисунок - Подсистема управления локомотивом
Подсистема управления локомотивом осуществляет:
- автоматический разгон в режиме ручного регулирования и авторегулирования посредством выдачи дискретных управляющих сигналов в заданной последовательности;
- обмен информацией с подсистемами и другими системами, выбор информации обеспечивающей оптимальное ведение поезда в области безопасных режимов;
- отключение неисправных ТЭД и отображение информации на мониторе;
- измерение и контроль величины напряжения контактной сети и отображение ее на мониторе;
- измерение и контроль величины напряжения на тормозных резисторах и отображение ее на мониторе;
- измерение и контроль величины тока в цепях тяговых электродвигателей во всех секциях электровоза и отображение ее на мониторе;
- управление вспомогательными цепями и вспомогательными машинами электровоза;
- отображение на мониторе информации о перегрузке в цепях тягового электродвигателя при превышении заданного значения;
- защиту от сильного боксования и юза путем снижения скорости с отображением информации на мониторе;
- подсчет потребляемой и рекуперируемой энергии;
- запись в энергонезависимую память параметров функционирования;
- выдачу кодового сигнала для включения соответствующего голосового сообщения из набора голосовых сообщений;
- отображение на мониторе служебной информации о работе системы и состоянии электровоза;
- самодиагностику и отображение на мониторе информации по неисправностям системы;
- прием и выдачу информации на монитор от подсистемы А и подсистемы Д.
Измерение и контроль различных параметров позволяет системе:
- производить автоматическое увеличение скорости до выхода на заданную траекторию;
- поддерживать заданную силу тяги;
- увеличивать или уменьшать заданную силу тяги;
- переходить в режим выбега без разбора силовой схемы;
- производить автоматическое изменение силы тяги при наличии перегрузки ТЭД в течение заданного временного интервала;
- запретить изменение силы тяги при наличии перегрузки ТЭД.
Мощность «Гранита» позволит машинистам водить составы весом до 9 — 10 тыс. т, что в два раза больше, чем вес состава, который способен взять электровоз BЛ10 [1]. «Гранит» не имеет аналогов в России и в других странах, где ширина колеи составляет 1520 мм. В нем внедрено 60 % инженерных решений, ранее не применявшихся в российском машиностроении.
Сравнительные характеристики:
Параметры
ВЛ11
2ЭС6
Улучшение 2ЭС6 к уровню ВЛ11
2ЭС10
Улучшение 2ЭС10 к уровню 2ЭС6
Конструкционная скорость, км/ч
100
120
+20%
120
-
Статическая нагрузка на ось, кН
225
249
+10,6%
249
-
Максимальная сила тяги при трогании, кН
614
706
+15%
784
+11%
Сила тяги продолжительного режима, кН
314
418
+33,1%
538
+28,7%
Скорость продолжительного режима, км/ч
51,2
51,0
-
56,2
+10,2%
Мощность продолжительного режима, кВт
4600
6000
+30,4%
8400
+40,9%
Появление нового локомотива 2ЭС10 имеет особую важность для организации движения тяжеловесных поездов на полигоне Западно-Сибирской, Южно-Уральской и Свердловской железных дорог, в условиях сложных рельефных участков.
2. Железные дороги мира [Текст]: ежемесячный научно-технический журнал. –М.: ОАО «Российские железные дороги», издается с 1961 года –(М.). –Выходит ежемесячно.-ISSN 0321-1495
3. Электровоз грузовой постоянного тока 2ЭС10 с асинхронными тяговыми электродвигателями [Документ]: ООО «Уральские Локомотивы» Руководство по эксплуатации